
 产品:32
产品:32
 联系我们
联系我们

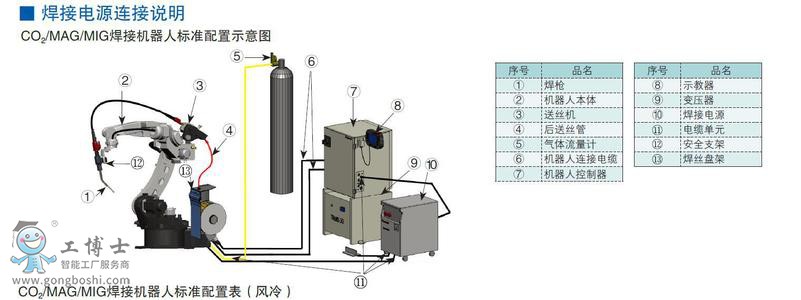
松下机器人接线与设置
一、松下机器人设置
(1)接上线后,开启开关电源。示教盒处在示教的状态;
(2)开启机器人菜单栏的“设置”选择项,选取控制箱,开机启动的方式;
(3)选取“自動的方式”,“编号的方式”,“信号的方式”;
(4)选取“配备导入”,确保“1”设置为1号接口,“2”设置为2号接口,“4”设置为3号接口(这儿的1,2,4通常是指接口1,2,3所相应的步骤“Prog0001”,“Prog0002”,“Prog0004”的缩写);
(5)选取“配备輸出”,确保“选通”设置为8号接口(通用的輸出接口组);
(6)回去“设置”,选取“I/0”,*末1项“的状态输入输出”,在小窗口中找到“ 外部在开机启动”,选取并设置为“有效”及8号接口(通用的导入接口组),完成设置。注:也可以编写些处在工位上的简单运作步骤,并肩其通过寿应工位的调用步骤的“CALL”命令调用,来确保开机启动盒的接线与设置是否准确。
(1)接上线后,开启开关电源。示教盒处在示教的状态;
(2)开启机器人菜单栏的“设置”选择项,选取控制箱,开机启动的方式;
(3)选取“自動的方式”,“编号的方式”,“信号的方式”;
(4)选取“配备导入”,确保“1”设置为1号接口,“2”设置为2号接口,“4”设置为3号接口(这儿的1,2,4通常是指接口1,2,3所相应的步骤“Prog0001”,“Prog0002”,“Prog0004”的缩写);
(5)选取“配备輸出”,确保“选通”设置为8号接口(通用的輸出接口组);
(6)回去“设置”,选取“I/0”,*末1项“的状态输入输出”,在小窗口中找到“ 外部在开机启动”,选取并设置为“有效”及8号接口(通用的导入接口组),完成设置。注:也可以编写些处在工位上的简单运作步骤,并肩其通过寿应工位的调用步骤的“CALL”命令调用,来确保开机启动盒的接线与设置是否准确。
二、松下机器人接线
1.机器人导入:
(1)的状态导入:将 外部开机启动盒的停下按键的一头并联至机器人的状态导入接口组的8号接口(已內部指定的停下接口)将松下机器人机器人的状态导入接口组的7号接口(內部指定的启动接口)跳线短接至通用的輸出接口组的8号接口(通常指定的此接口为选通接口)
(2)通用的导入:将 外部开机启动盒的开机启动按键的一头接入至机器人通用的导入接口组(8个接口),按开机启动盒的工位,1号工位的开机启动接入至通用的导入接口组的1号接口,2号工位联接至2号接口,按此类推;将全部 外部开机启动盒的重启动按键的一头并联至通用的导入接口组的8号接口(通常接至此,接口)。
2.机器人輸出:
(1)的状态輸出:无接入。
(2)通用的輸出:将机器人的状态导入接口组的7号接口跳线短接至通用的輸出接口组的8号接口(通常指定的此接口为选通接口)
3.开机启动盒接线:
将外部开机启动盒全部按键(除急停开关)的一头做为Com端串连,并将各开机启动盒,Com 端并接入在机器人Com端的任何接口(4个接口)。
3.开机启动盒接线:
将外部开机启动盒全部按键(除急停开关)的一头做为Com端串连,并将各开机启动盒,Com 端并接入在机器人Com端的任何接口(4个接口)。
更多信息请咨询:松下机器人
- 下一篇:松下机器人调试焊接参数时应注意哪些方面?
- 上一篇:松下机器人:钢管柱组的焊接方法